![]()
2012. 12. 23
![]()
2012. 12. 23

望遠鏡で天体を観測するときは、日周運動する対象を容易に追尾できる機構が必要になります。なぜなら、高倍率望遠鏡の視野はとても狭く、対象がすぐに視野の外に出てしまうからです。同様に、天体写真において対象を止めた撮影(ガイド撮影)を行う場合も追尾機構が必要になります。天体は暗くシャッタ時間を長くせざるを得ないため、その間対象の動きを正確に追う必要があるのです。
この追尾機構のことを赤道儀といい、手動式のものと自動式のものがあります。ガイド撮影では一定の速度で正確に追尾する必要があるため自動式が必要になります。自動赤道儀はカメラ用の小型で安価なものが多く出回っていますが、原理は単純で難しいところはないので自作してみました。目的はDSCを使用したガイド撮影とします。
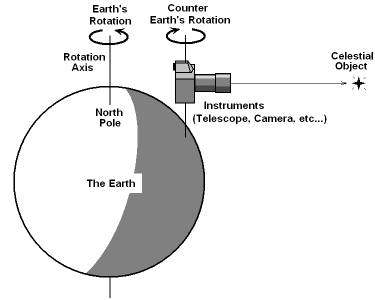
もちろん、天体の日周運動は地球の自転によって起こる見かけ上のものです。そこで、望遠鏡やカメラを図1に示すように地軸に平行な軸(極軸という)で地球の自転の反対方向に回すことにより、自転の影響を容易にキャンセルできます。天体の日周運動の角速度は太陽と他の恒星では少し異なり、恒星の場合で 72.92E-6[rad/s]となります。
極軸と地平のなす角度は観測地の緯度によって異なるので、極軸は任意に設定できなければなりません。多くの赤道儀では極軸の設定を容易に行えるようにするため、ポーラ・ファインダという小型の望遠鏡が備えられています。ポーラ・ファインダは赤道儀の軸に平行に固定されているので、これで北極星をとらえることにより極軸を合わせられるわけです。
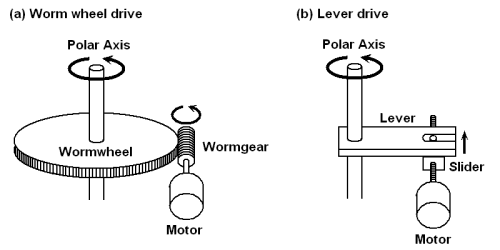
赤道儀で天体の日周運動を追うためには、とてもゆっくりでなおかつ正確な速度で主軸を駆動する必要があります。このため、非常にギア比の大きな減速機構を同期モータで駆動することになります。製品化されている赤道儀では図2aに示すように主軸にウォーム・ホイールが取り付けられ、これが最終ギアになっています。また、自作における構成では図2bに示すようなレバー駆動式の駆動機構がよく用いられます。レバー駆動式は高価なウォーム・ホイール(適当な標準品がないため特注になる)が必要なく汎用部品だけで作れるため、自作には手頃な構成といえます。今回はこの方式で製作することにします。
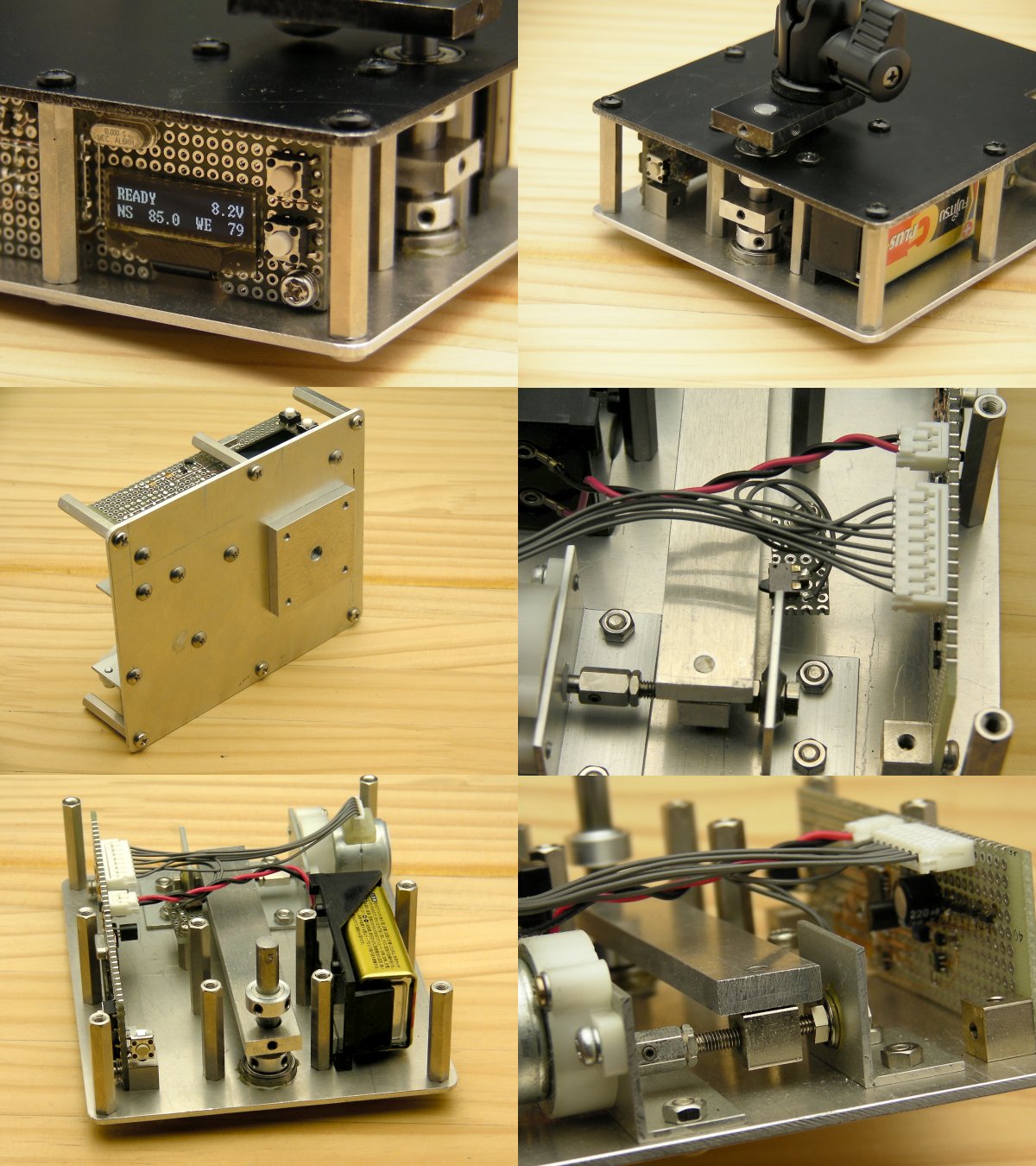
写真2に製作した自動赤道儀のメカを示します。本体のサイズは120(D)×100(W)×35(H)で、質量は450gとなりました。スライダの送りネジは減速機付きのステッピング・モータで直接駆動しています。レバーの長さは85mm、送りネジにはM3のネジ棒(ピッチ0.5mm)を利用したので、1068歯のウォーム・ホイールに相当する減速比となります。ステッピング・モータは1-2相励磁とし、出力軸で960[ステップ/回転]となっています。このため、最終的な駆動分解能は 1025416[ステップ/回転]となります。もちろん、レバー駆動式なので実際に一回転することはなく、ごく狭い範囲での使用となります。製作上の注意点としては、レバーの長さ(主軸−力点)を正確にすることと、各部の剛性を確保することです。カメラの重みでたわみを生じるようでは設計通りの性能は得られません。特に主軸周りは重要で、ブロックを追加してたわみを抑えたり、両軸受けでぐらつきが無いようにするなど注意深く製作しなければなりません。
メカ制御の入出力はステッピング・モータの駆動と、原点復帰のためのリミット・スイッチだけです。レバー駆動式のため動作時間に限界があるため、ディスプレイには動作時間を表示するようにしています。それと仰角くらいは測りたかったので基板上にチルト・センサを載せてみましたが、精度が悪くあまり意味がありませんでした。結局、極軸は北極星を見ながら目見当で合わせていますが、極軸合わせは重要なので何らかの工夫が必要になりそうです。
コントローラの機能としては、モータを回すことが全てです。これといった制御は必要ありませんが、レバー式なので原点復帰(巻き戻し)機能は必要になります。モータの速度はメカの設計に基づき任意かつ正確に制御する必要があるため、DDS方式でステップ・タイミングを生成しています。また、レバーの工作精度に起因する速度エラーを補正するため、速度の微調整機能も設けてあります。
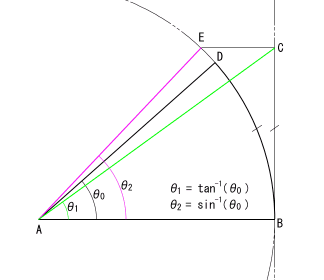
直線運動するスライダが円運動するレバーに作用する点の位置は一定ではないので、ピンとフォークなどで作用点の移動を許容しないと動きません。図3にレバー駆動式赤道儀の動作を示します。Aを主軸の中心、A-Bをレバーの初期位置(0分)とし、スライダBの速度を一定にして送りはじめます。さて、一定時間後B-Dに相当する距離だけスライダを動かしてレバーをθ0まで動かしたつもりですが、実際には図に示すようにスライダの軌跡はB-Cとなり、想定した角度と実際のレバーの位置との間にずれが生じてしまいます。ピンがスライダ側でフォークがレバー側のときはグリーン、その逆の場合はマゼンタが実際のレバーの位置となります。なお、図中のθの単位はradです。
では、実際にエラーが撮影にどの程度影響するのか見積もってみます。このExcelシートでは、asin/atan誤差、工作精度、送り速度の誤差の複合誤差を見積もることができます。製作ではピンの位置をレバー側としているので、それにしたがって計算(asin)しています。まずは、使用するカメラの仕様(焦点距離と画素ピッチ)を入力します。例として焦点距離25mm、画素ピッチ4.3μmとしてみます。この画素ピッチは、M4/3センサなら12M、APS-Cセンサなら18Mです。グラフには経過時間と画素単位のブレの関係が表示されます。このブレは天の赤道上におけるもので、極に近い天体ではもっと少なくなります。もちろん、ソフトウェアによる補正で完全にキャンセルすることもできますが、20分間に渡って露光してもブレは0.2画素未満で、このシャッタ時間と画角の場合asin/atanエラーほぼ無視できるレベルといえます。
次にレバーの長さ(A-B)に誤差を加えてみます。85mmの設計に対して0.05mmの誤差としてみたところ、asin/atan誤差を大きく上回り、グラフの傾きが反転するほど大きな影響を与えています。実際、0.05mmの誤差で組み立てることは困難なので、これよりはるかに大きな大きなブレになるでしょう。2〜3分程度のシャッタ時間なら0.5mm狂っても問題ないでしょうけど、焦点距離によってはソフトウェアによる補正が必要になりそうです。
システム・クロックの誤差もブレの原因になります。セラミック振動子は±5000ppmの誤差がありますが、これもソフトウェアによる補正が可能です。でも、温度特性も悪いのでやはり水晶振動子を選んだ方が無難であることが分かります。
これらの主軸角速度の誤差とは別に、極軸設定のずれもブレの原因になります。下側のグラフは主軸が極軸と平行にセットされていないときに発生するブレを示しています。ブレの大きさはずれの角度が同じでもその向きにより異なるので、最悪値を計算しています。このように、極軸設定はとても重要であることが分かります。

{kind=link}